 |
 |
 |
 |
|
Главная Источники вторичного электропитания 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 [ 73 ] 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 При относительно небольших токах управления силовыми тиристорами маломощные тиристоры, входящие в состав управляемого моста, могут быть исключены из схемы. В этом случае сигналы управления силовыми тиристорами Дг, Де, Ди формируются неносредственно транзисторами Гь Гз, Г5. Построение управляемого выпрямителя в соответствии со схемой на рис. 9-26 делает устройство управления независимым от значения напряжения на вторичной обмотке силового трансформатора. Это дает возможность, сохранив все указанные преимущества, произвести оптимальный выбор режимов и параметров цепей управления и тем самым значительно расширить область применения таких схем. Качество работы тиристоров существенно зависит от выбора параметров цепи управления. Вольт-амперные входные характеристики тиристоров имеют большой разброс от образца к образцу. Кроме того, ток управления, необходимый для отпирания тиристора, изменяется с изменением температуры перехода, значительно снижаясь по мере роста температуры. Поэтому для обеспечения точного момента включения тиристора импульс тока управления должен иметь возможно более крутой передний фронт, а величина импульса должна быть достаточной для надежного отпирания любого тиристора данного типа. На рис. 9-27 в каче- fj,cp max у.н так ((1=2) Зли прямоуг. имп Предепьные нагрузочные пряМ111е Ру н тах(Ч=2) для синус, имп. 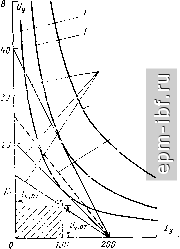 Нагрузочная прямая для прямоуг. имп. 300 к А Рис. 9-27. Характеристики управления тиристора КУ201. стве примера изображены характеристики управления тиристора тина КУ201. Заштрихованная зона представляет собой область возможных точек отпирания тиристоров при температуре перехода от -60 до --110°С. Эта область определяется значениями тока и напряжения управления, соответствующими полному спрямлению прямой ветви вольт-амперной характеристики тиристора (/у,от и /у,от) . Источник управляющего сигнала необходимо рассчитать так, чтобы значения вырабатываемых им токов и напряжений превышали минимально необходимые для отпирания любого тиристора во всем диапазоне рабочих температур. Однако при этом не должны быть превышены указанные в справочных данных максимально допустимые значения тока и мощности на управляющем переходе. В справочных данных обычно указывается значение максимально допустимой средней мощности на управляющем электроде Ру,сх,тах. Однако управление тиристорами осуществляется при помощи импульсов, для которых допустимая импульсная мощность Ру,-штах ВЫШб ДОПуСТИМОЙ СрСДНеЙ МОЩНОСТИ. Допустимая импульсная мощность для прямоугольных импульсов определенной длительности в ряде случаев указывается в справочных данных. При отсутствии данных о допустимой импульсной мощности она может быть определена по допустимой средней мощности следующим образом: при прямоугольном управляющем импульсе Pj,iimaxPy,cp maxQ, (9-38) где д=Г/и -скважность импульса; Г -период повторения импульса; - длительность импульса; при синусоидальном управляющем импульсе со скважностью q2 Ру,ятах^Ру,ср max- (9-39) Однако нельзя чрезмерно увеличивать импульсную мощность за счет увеличения скважности q- Обычно считается, что допустимая импульсная мощность ни при каких условиях не должна более чем в 10 раз превышать допустимую среднюю мощность [38]. Кривые допустимых мощ'Ностей при разных значениях длительности управляющего импульса могут быть нанесены на характеристики управления и представляют собой равнобочные гиперболы с осями координат в качестве асимптот (рис. 9-27). Кривые допустимой мощности совместно с областью возможных точек отпирания тиристора дают возмож-222 ность построить нагрузочные прямые и определить выходные параметры источника управляющего сигнала. Для четкого отпирания тиристоров во всем температурном диапазоне нагрузочные линии должны располагаться выше и правее заштрихованной площади. Однако они должны одновременно оставаться ниже и левее кривой, максимально допустимой мощности, соответствующей данному конкретному значению скважности управляющего импульса (рис. 9-27). Выходные параметры источника управляющего сигнала определяются из следующих условий: /ист maxS/irp,y max] maxUjia maxSUy rniny (9-40) Гi-[/ист max!Iiica max, (9-41) где /ист max, [/ист max - максимальныс амплитудные значения тока и напряжения выходной цепи источника управляющего сигнала; г, - внутреннее сопротивление-источника управляющего сигнала; /пр,у max - максимально допустимое значение тока управления, приведенное в справочных данных; [/у max, [/у mm - мэксимальное и-минимальное напряжения цепи управления, соответствующие предельным нагрузочным прямым при выбранном значении /ист max- при синусоидальном управляющем импульсе в выражении (9-40) рекомендуется вместо /пр,у max использовать максимально допустимое значение тока управления в импульсе /пр,у,и max, если оно приведено в справочных данных. Напряжения [/у max и Uymin могут быть определены аналитически. Так как отрезок касательной к гиперболе, заключенный между асимптотами, делится в точке касания пополам, получаем: [/у тах=4Руи то(1х ист max, (9-42) где Ру,и max - максимально допустимая мощность, соответствующая данному значению скважности и определенной форме управляющего импульса. Минимально допустимое значение напряжения управления определяется очевидными выражениями: для прямоугольного управляющего импульса л -у. от fист max /0/IQ\ Uymin = -J-7-- (9-43) ист max у, от |
|
© 2007 EPM-IBF.RU
Копирование материалов разрешено в случае наличия письменного разрешения |