 |
 |
 |
 |
|
Главная Источники вторичного электропитания 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 [ 76 ] 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 Так как напряжение питания МУ в схемах управления на рис. 9-23, 9-24 является заданным и равно напряжению на вторичной обмотке силового трансформатора, то выражение (9-54) может быть использовано для определения f/исттах- Далее определяем число витков и диаметр провода рабочей обмотки МУ: т /мУ ср (9-56) (9-57) где МУ ср - ист maxl МУ ср ист max - при питании напряжением синусоидальной формы; МУ ср ист та х/2; и, М?/ ср - при питании напряжением прямоугольной формы и для схем на рис. 9-23, 9-24, 9-26. При определении тока холостого хода и числа витков обмотки управления удобнее всего пользоваться динамической кривой размагничивания. Динамическая кривая размагничивания наиболее полно отражает поведение магнитопровода в схеме усилителя и является основной магнитной характеристикой [39]. На рис. 9-31 в качестве примера приведены динамические кривые размагничивания ленточного тороидального магнитопровода из сплава 50НП толщиной 0,05 мм при частотах 50 и 400 Гц. Значение тока холостого хода МУ находится из выражения 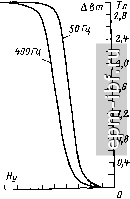 / Wc (9-58) А/см 0,3 0,2 0,1 Рис. 9-31. Динамические кривые размагничивания тороидального магнитопровода из ленты сплава 50 НП толщиной 0,05 мм. где Яо соответствует коэрцитивной силе динамической нетли гистерезиса нри данном значении индукции Вт и определяется по динамической кривой размагничивания. При известном магнитопроводе и заданном максимальном изменении тока управления Д/, уМУ max С ПОМОЩЬЮ ди- намической кривой размагничивания легко определить число витков обмотки управления МУ: Affy maxlo, ХЛ) i у;МУ max (9-59) где АЯу max -максимальное изменение напряженности магнитного поля в сердечнике, обеспечивающее работу МУ на крутом участке кривой размагничивания. Для оценки усилительных свойств рассматриваемых магнитных усилителей необходимо знать зависимость угла зажигания а от изменения тока управления МУ. Путем совместного решения управления характеристики вход - выход и уравнения выходной цепи МУ были получены приближенные зависимости а = f(A/yjy), которые для рассматриваемых схем МУ имеют вид: а = arccos 1 - (9-60) \ уШтах J - при синусоидальной форме кривой напряжения питания; я = arccos уМУ у МУ max 0<Д/ уМУ у МУ max а = arccos 2 ЗД/, уМУ у МУ max J Чму (9-61) 2 уМУ у МУ тал: ~ для схем на рис. 9-23, 9-24, 9-26; С^у МУ max (9-62) - при прямоугольной форме кривой напряжения питания. Зависимость угла зажигания от изменения тока управления МУ при синусоидальной форме кривой на-прял<ения питания в общем случае является нелинейной. Поэтому коэффициент усиления МУ по углу зажигания му ( ) = < /<Ч'МУ есть величина переменная. Однако, как показано выше, рабочий диапазон изменений а определяется харак- 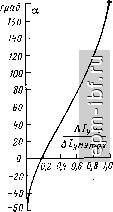 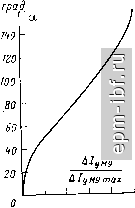 (7,2 0,4 0,6 0,8 1,0 Рис. 9-32. Зависимость а = уМУ \уМУ max } при синусои- дальной форме напряжения питания МУ. Рис. 9-33. Зависимость а = / для схем на %МУ \ \уМУ max ) рис. 9-23, 9-24, 9-26. теристикой вход - выход управляемого выпрямителя (рис. 9-4) и лежит в пределах 20°<а<140°С. На рис. 9-32 представлена зависимость ° = /(Д^уМу/ЧмУтах построенная по уравнению (9-60) и показывающая, что в указанном диапазоне зависимость угла зажигания от тока управления МУ наиболее близка к линейной. Поэтому с достаточной для практических расчетов степенью точности коэффициент усиления .му(°-) в рабочем диапазоне можно считать величиной постоянной. 232 |
|
© 2007 EPM-IBF.RU
Копирование материалов разрешено в случае наличия письменного разрешения |