 |
 |
 |
 |
|
Главная Помехи и шумы в сигналах 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 [ 103 ] 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 Устойчивость при изменениях уровня сигнала. Электронная система АПЧ может быть неустойчивой в условиях замираний или временных прекращений передачи принимаемого сигнала. В этих случаях уменьшается или исчезает управляющее напряжение и изменяется частота гетеродина. Если Uy = О, то (Частота гетеродина принимает значение, которое соответствует отсутствию АПЧ. Если при этом частота будет такой, при которой расстройка находится в пределах участка ad или ad (рис. 11.4), то после восстановления напряжения сигнала на входе приемника настройка на сигнал уже не восстановится. Для возобновления приема необходимо подстроить приемник вручную. Настройка восстанавливается автоматически при поисковой АПЧ. Для повышения устойчивости системы электронной АПЧ при замираниях сигнала увеличивают постоянную времени ФНЧ Тф. Однако при этом снижается чувствительность системы к сравнительно быстрым изменениям частоты. В некоторых случаях применяют устройства, автоматически изменяющие Тф в зависимости от амплитуды напряжения принимаемого сигнала. При уменьшении амплитуды Тф увеличивается и регулирующее напряжение в течение некоторого времени уменьшается мало. Более устойчивой к изменениям уровня принимаемого сигнала является система АПЧ, полоса втягивания которой близка к полосе удержания. 11.4. Аналоговая система фазовой автоматической подстройки частоты Принцип ФАПЧ аналогичен принципу АПЧ, однако в измерительном элементе используется не частотный, а фазовый детектор, в котором сравниваются колебания стабилизируемого гетеродина и генератора образцовой частоты (ГОЧ) /qj, (рис. 11.1, б) или сигнала промежуточной частоты f и напряжения ГОЧ (рис. 11.1, а). При ФАПЧ устанавливается постоянство разности фаз, и, следовательно, равенство частот двух колебаний (f = f или /пр~ 4п)- Если опорное колебание подвержено действию аддитивных помех, между ПГ и ФД включают четырехполюсник обратной связи, чем достигается однонаправленность петли авторегулирования и резко ослабляется проникновение помех через ФД иа выход, минуя ФНЧ. Система ФАПЧ может выполнять различные функции. Если параметры образцового колебания непостоянны, система выполняет функции узкополосного фильтра, демодулятора и следящего усилителя. Она выполняет функцию фильтра и в том случае, когда параметры образцового сигнала постоянны, но на вход вместе с образцовым сигналом попадает аддитивная помеха. Систему ФАПЧ можно использовать для построения нелинейного фильтра и демодулятора колебаний с ЧМ и ФМ. При необходимости восстановления несущей сигналов с ЧМ и ФМ можно применить систему ФАПЧ с малой фазовой ошибкой [123]. Если требуется быстродействие, а также при значительных колебаниях частоты образцового сигнала для уменьшения фазовой ошибки можно использовать комбинированную систему (рис. 11.5) ФАПЧ и АПЧ. Слежение за частотой входного сигнала осуществляется системой ФАПЧ гетеродина ПГ2. Параметры системы ФАПЧ выбираются так, чтобы получить минпмаль- ФНЧ уэг
Рнс. 11.5. Структурная схема комбинированной системы ФАП и АПЧ 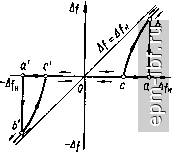 Рис. 11.6. Характеристика регули. рования системы ФАПЧ НО возможные динамические и шумовые ошибки слежения. Частота колебаний ПГ2 будет с высокой точностью равНа частоте входного сигнала. Узкая шумовая полоса системы ФАПЧ позволяет получить большой выигрыш в отношении сигнал/шум на выходе. Однако система ФАПЧ при малой шумовой полосе характеризуется малыми полосами втягивания и удержания, что затрудняет поиск сигнала и уменьшает надежность слежения. Для разрешения этого противоречия дополнительно используется более грубая система АПЧ, которая осуществляет слежение за частотой входного сигнала с некоторой ошибкой, но имеет достаточно большую полосу втягивания. Максимальная ошибка слежения системы АПЧ должна находиться в пределах полосы удержания системы ФАПЧ. При изменении частоты образцового сигнала, поступающего на вход системы, на входе управляющего элемента УЭ1 появляется управляющее постоянное напряжение, вырабатываемое частотным дискриминатором нулевых биений ЧД, пропорциональное по абсолютной величине и одноименное по знаку отклонения частоты образцового сигнала от частоты вспомогательного подстраиваемого генератора ПП. Если ПП и ПГ2 идентичны, то полученное напряжение содержит информацию и о расстройке ПГ2 относительно образцового сигнала. Это напряжение используется для компенсации начальной расстройки ПГ2. При условии линейности и равенства крутизны характеристик УЭ1 и УЭ2 для компенсации расстройки ПГ2 достаточно сложить в сумматоре S напряжения с выходов ФНЧ и подавать полученную сумму на УЭ2. В этом случае система АПЧ уменьшает начальную расстройку в системе ФАПЧ, облегчая получение малой фазовой ошибки. Характеристика регулирования электронной системы ФАПЧ при малых изменениях частоты, когда статические характеристики УЭ и ФД можно полагать линейными, может быть представлена в виде dffldt = Асо = Дсод - уэХфд/СфАГуф, где 5уэ и 5фд - крутизна характеристик УЭ и ФД соответственно; Кф - коэффициент передачи ФН; Ку - коэффициент усиления каскада усиления в ЦОС. Примерный вид характеристики регулирования системы ФАПЧ показан иа рис. 11.6. При малых значениях начальной расстройки частота ПГ равна частоте OF (режим удержания). При некотором значении начальной рас- стройки (точка а или а') система ФАПЧ выходит из режима удержания и переходит в режим биений (точки 6 нли Ь'), прн котором среднее значение частоты ПГ отличается от частоты ОГ. Область начальных расстроек между Точками она' называется полосой удержания системы ФАПЧ, а область начальных расстроек между точками с и с', в которой при любых начальных условиях устанавливается режим удержания (слежения),- полосой втягивания. Полоса удержания определяется разностью граничных значений частоты ПГ, соответствующих наибольшему и наименьшему напряжению на УЭ. В установившемся режиме при медленных изменениях частоты достигается практически полная синхронизация ПГ колебаниями ГОЧ (А/ = = А/ц). В динамическом режиме, в условиях изменяющейся частоты, фазовый сдвиг между колебаниями ГОЧ и ПГ непостоянен (частоты генераторов не равны). Переходный процесс в системе ФАПЧ. В момент включения системы частоты ПГ и ГОЧ обычно не равны и наблюдается режим биений. При этом сигнал ПГ модулируется по частоте напряжением биений. В аависимости От знака напряжения биений разность частот то повышается, то понижается. В результате длительности положительных и отрицательных полуволи напряжения биений получаются разными, и иа выходе ФД образуется постоянная составляющая напряжения, которая вызывает изменение частоты биений относительно начальной расстройки. Если начальная расстройка не выходит за пределы полосы втягивания, то постоянная составляющая снижает частоту биений до нуля, и возникает режим удержания. Переходный процесс будет апериодическим, если выполняется условие Кфичф < 0,25, где /Сфдпч = уэфд/Сф/Су - кдаффициент усиления системы ФАПЧ; Тф - постоянная времени ФНЧ. В противном случае переходный процесс будет колебательным. Если выполняется условие Ч^ФАПЧ<0.06. (11.8) время установления переходного процесса ие зависит от Тф и равно [83] <У = 0,251п(А/н/Д/)/5уэушах. (11-9) где А/н - начальная разность частот сигнала и гетеродина; А/ - конечная разность этих частот (по истечении времени t); (/у^ - максимальное значение управляющего напряжения на УЭ. Полоса удержания и полоса втягивания системы ФАПЧ. При достаточно сильном сигнале на входе системы полоса удержания определяется значением Цуиах> следовательно, максимальным значением напряжения на выходе ФД, которое соответствует значениям угла Он - л, ограничивающим область устойчивой работы системы, н равна уд = З'УЭутах- Если характеристика ФД в пределах от О до -л линейна, то St/ygan ли я5фд/Сф/Су. При этом Д^удпЗДуэ'Ф^ (11-10) 12 7-230 313 |
|
© 2007 EPM-IBF.RU
Копирование материалов разрешено в случае наличия письменного разрешения |