 |
 |
 |
 |
|
Главная Помехи и шумы в сигналах 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 [ 112 ] 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 Rim R2620 % Ж y VI)2 I X a 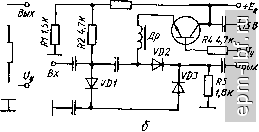 Рис. 11.21. Практические схемы регулируемых делителей напряжения на полупроводннко. вых диодах flf ЮОк п г\1гг Rn П X П' иШ 47/(\ 1,5/,] у 12, -о R8 1м УТЗ 7к Рис. 11.22. Практическая схема регулируемого делителя напряжения на полевых транзисторах и резистор /?5; дифференциальное сопротивление диода мало. На резисторе R5 создается напряжение +9 В, приложенное к диодам VD1 и VD3. Эти диоды заперты, поскольку с другой стороны на них подано лишь +7.В. При снижении управляющего напряжения до +2 В ток VD2 уменьшается, а диоды VDI и VD3 открываются, их сопротивление уменьшается. При этом КП снижается на 35 дБ. Внешние проводимости делителя мало изменяются при регулировке. На рис. 11.22 приведена схема Г-образного делителя напряжения на ПТ. В качестве НЭ используется канал сток-исток. Глубина регулировки КП достигает 70 дБ на частотах до нескольких мегагерц. Однако до 40 дБ РХ делителя практически линейна. 11.9. Основные свойства системы АРУ обратного регулирования Система АРУ обратного регулирования представляет собой нелинейную систему автоматического регулирования. Процессы в такой системе описываются нелинейным дифференциальным уравнением. Решение этого уравнения оказывается громоздким и сложным, однако оно существенно упрощается при линейной и экспоненциальной аппроксимации регулировочной характеристики. Близкая к линейной РХ свойственна регулируемым каскадам на полевых транзисторах, мостовым и некоторым потеициометриче-ским регуляторам. Каскадам на лампах и биполярных транзисторах, а так- 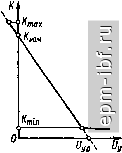 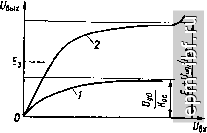 Рис. 11.23. Линейная аппроксимация регулировочной характернсти-кн Рис. 11.24. Графики амплитудных характеристик усилителей с АРУ же МНОГИМ потенцнометрическим регуляторам свойственны РХ, близкие к экспоненциальным. При линейной аппроксимации РХ изменяющийся в процессе АРУ коэффициент усиления (передачи) = иач(1-уо). (11.36) где /Cjigq - коэффициент усиления РУ при управляющем напряжении = 0; i/yQ - значение U, при котором К сйращается в нуль. В реальных схемах глубина регулировки ограничена, поэтому К не бывает равным нулю. Рабочий участок характеристики К. (U) расположен выше оси напряжений (рис. 11.23). Сверху он ограничен наибольшим уси-лением {К^ > К^ ). Амплитудная характеристика устройств с АРУ. Амплитуда выходного напряжения усилителя с линейной РХ (11.36) вых = {вх)вх при и^.-оо асимптотически стремится к Uq/Kq при незадержанной АРУ и к Eg + UyQ/Ko с при задержанной АРУ. Здесь К^, <. = КуК/.;Кф - статический коэффициент передачи цепи обратной связи; /Су - коэффициент усиления усилителя АРУ; /Сдет - коэффициент передачи детектора АРУ; Сф - коэффициент передачи фильтра АРУ; £3 - напряжение задержки АРУ. В реальных системах при больших входных сигналах амплитудные характеристики также проходят весьма полого, приближаясь к указанным значениям, до тех пор, пока не возникнут значительные нелинейные искажения или перегрузки каких-либо элементов РУ или цепи обратной связи, либо пока не приостановится уменьшение К {Uy)- После этого крутизна амплитудной характеристики резко возрастает (рис. 11.24), либо достигается постоянство за счет ограничения сигнала. В диапазоне U < U выходное напряжение изменяется по закону вых вых max вых = вх-нач ( + о. с^з/уо)/{1 + К,..К о.с^вх/уо)- Переходный процесс в системе АРУ. При изменении любого параметра РУ и цепи обратной связи в устройствах с АРУ возникает переходный процесс, по окончании которого устанавливаются статические значения регули- руемых величини К. Переходный процесс может иметь колебательный характер, если неправильно выбрано количество звеньев ФНЧ и их параметры. В этом случае невозможен нормальный прием сигналов. Наиболее широко применяются системы АРУ первого порядка, в которых имеется только один элемент с постоянной времени, значительно превышающей постоянные времени остальных элементов. Обычно таким элементом является однозвенный ФНЧ включенный на выходе безынерционного детектора системы АРУ. Переходный процесс системы АРУ первого порядка монотонный. Если задана длительность переходного процесса в системе АРУ^дру при перепаде амплитуд D , то максимально допустимое значение постоянной времени цепи АРУ можио выбрать из условия Тф<0.45/дру(1+С„ (П.37) где и. о. с ° вхрХо. о~ коэффициент интенсивности обратной связи; Sp- крутизна РХ; К^,. - коэффициент передачи цепи обратной связи; С^, - амплитуда входного сигнала. Коэффициент о <. соответствует заданному значению перепада D = ° вх. n/Bxmin амплитуд сигнала относительно минимальной амплитуды (/дх min РИ которой начинает работать система АРУ и D(, = 0. Значение /С„ о. о находят путем расчета, если известна аналитическая зависимость С„о с(вх)> или из графика зависимости <. (Сд), который легко построить, используя график РХ. Искажения модулирующего сигнала в приемнике с АРУ. При слишком малой постоянной времени возникают частотные, фазовые и нелинейные искажения модулирующего сигнала в приемниках сигналов с AM. Уровень этих искажений зависит от напряжения сигнала на входе. Минимально допустимое значение постоянной времени ФНЧ Тф опреде-лиется неравенством Гф>и.о.сшах/2п/ш1пРп. (И-38) где Рп представляет собой наименьшее нз чисел Pi = Vl - ( вых/ вх): Р2 = *г; Pз=tgф. Здесь П1ццх Пвх -допустимое изменение глубины модуляции; - допустимое значение коэффициента гармоник; <р -допустимое значение фазового сдвига. Значения k, ф, т^у^/ьх задают на минимальной частоте модулирующего сигнала f jnij,. Максимальное значение iC о с определяют из графика зависимости /Ca.o.c(iBx)- 11.10. Методика расчета систем АПЧ и АРУ Электронная система АПЧ гетеродина супергетеродинного приемника непрерывных сигналов Исходные данные: максимальные значения изменений частот сигнала Д/ и гетеродина Д/р (или дисперсии' случайных измеиеиий частот сигнала и гетеродина а^), допустимая остаточная ошибка системы АПЧ Д/д д, макси- |
|
© 2007 EPM-IBF.RU
Копирование материалов разрешено в случае наличия письменного разрешения |